3 Likes
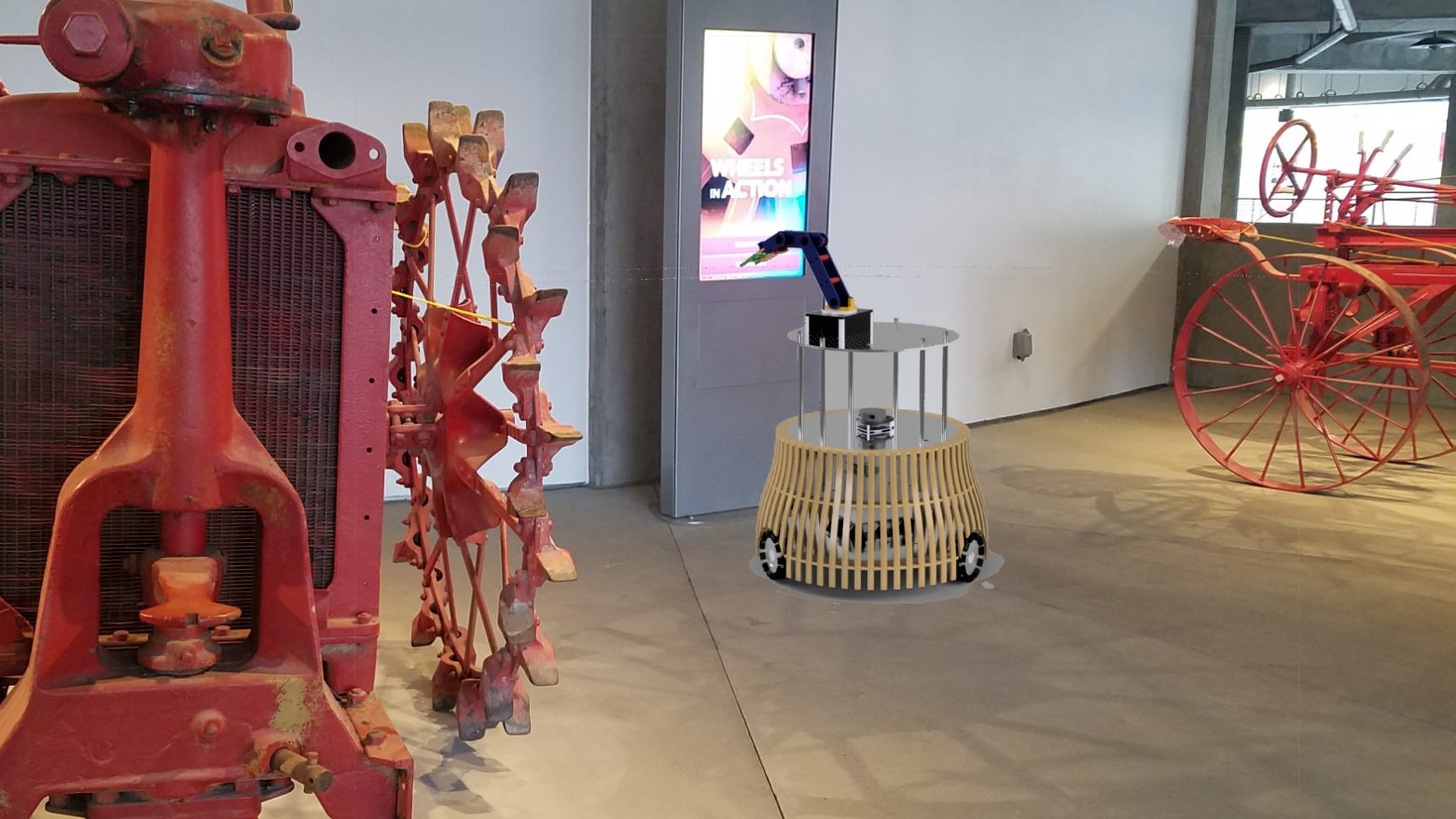
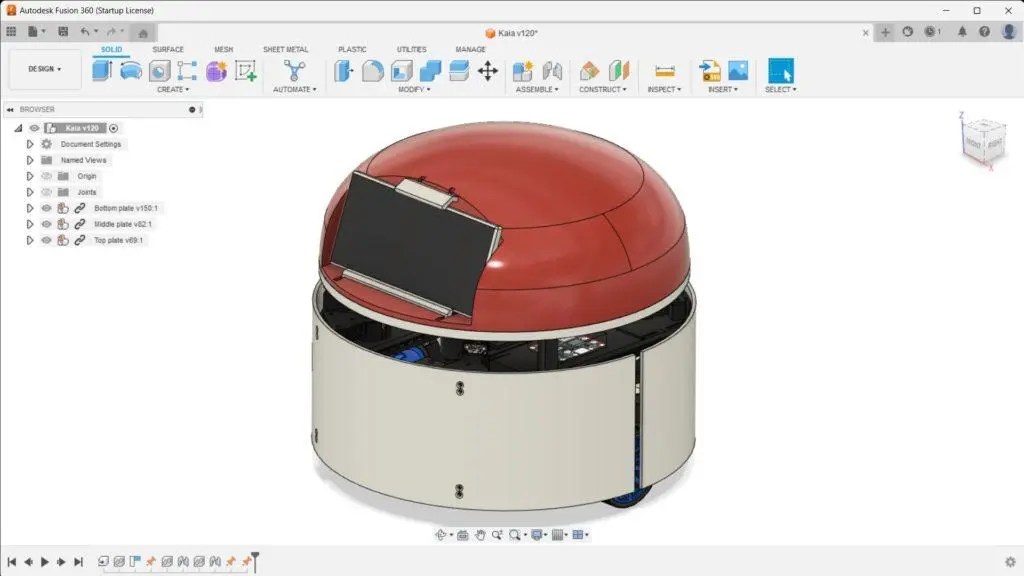
"The main controller is a #RaspberryPi 4 running #ROS2 (Robot Operating System), which takes inputs from a 360 LIDAR sensor, high-quality camera module, and IMU." https://hackaday.com/2021/10/03/telepresence-robot-for-doing-the-rounds/ #gnu #linux